Описание
Многоосевой промышленный джойстик-контроллер RT02 в основном используется для пропорционального гидравлического управления, управления двигателями с переменной частотой, дистанционного управления или электро-гидравлических приложений, таких как вращающаяся платформа (буровая установка), кран, воздушные рабочие платформы, вилочные погрузчики, мобильная гидравлика, тоннелепроходческая машина, таль, морские применения, строительная техника, гражданское строительство, военные транспортные средства, кабины транспортных средств, военная робототехника, прецизионные станки, оборудование для обработки материалов и т. д.
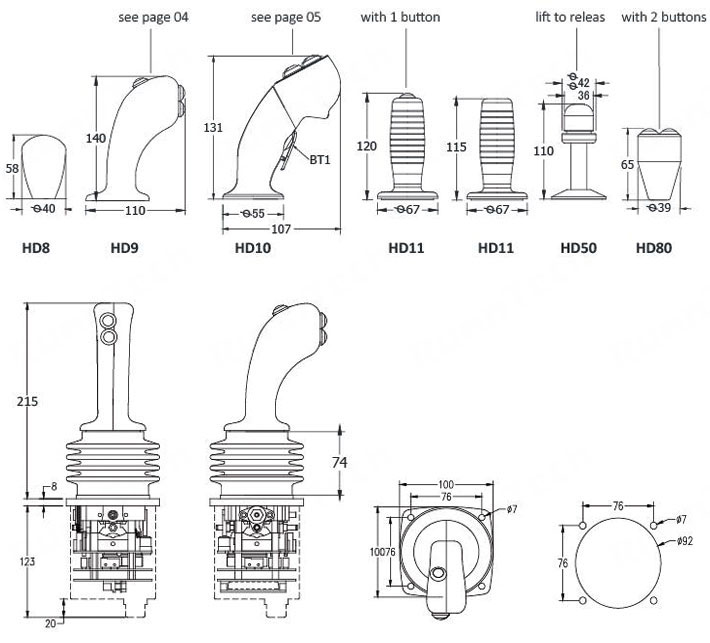
Многоосевой джойстик серии | RT02

HD9 grip with max. 8 pushbutton

HD10 grip with deadman & front panel max. 6 pushbutton

HD10 grip with deadman, rocker switch & 2 pushbutton

HD10 grip with deadman, thumbwheel & 2 pushbutton

HD10 grip with deadman & 2 proportional thumbwheel

HD10 grip with deadman & 1 proportional thumbwheel

HD11 grip with/without 1 pushbutton

HD50 grip with center-lock (lift to release)
Многоосевой джойстик серии | RT02