الوصف
وحدة التحكم في عصا التحكم الصناعية متعددة المحاور RT02 تستخدم بشكل رئيسي في التحكم النسبي الهيدروليكي، التحكم في محركات التردد المتغير، التحكم عن بعد أو التطبيقات الكهروهيدروليكية مثل الطاولة الدوارة (منصة الحفر)، الرافعة، منصات العمل الجوية، الشاحنات الشوكية، الهيدروليكا المتنقلة، آلة حفر الأنفاق، الرافعة، التطبيقات البحرية، آلات البناء، الهندسة المدنية، المركبات العسكرية، مركبات الكابينة، الروبوتات العسكرية، الآلات الدقيقة، معدات مناولة المواد، إلخ.
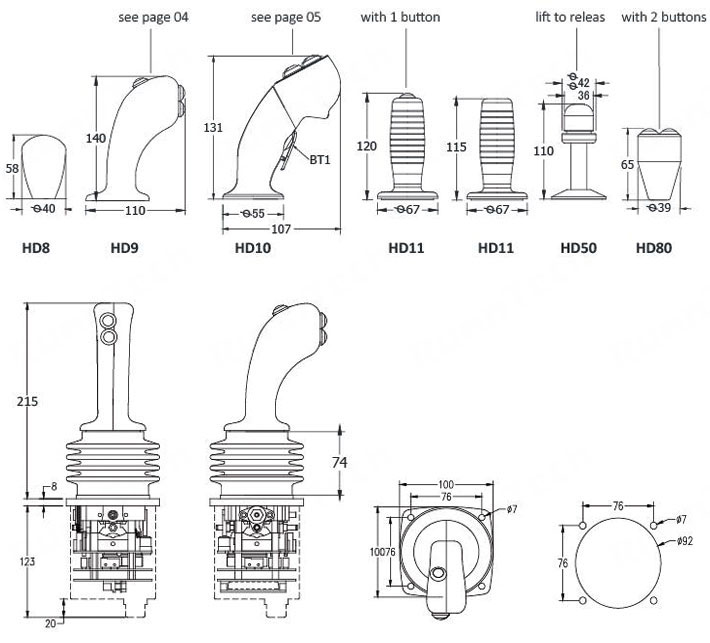
وحدة التحكم في عصا التحكم الصناعية متعددة المحاور | RT02

HD9 grip with max. 8 pushbutton

HD10 grip with deadman & front panel max. 6 pushbutton

HD10 grip with deadman, rocker switch & 2 pushbutton

HD10 grip with deadman, thumbwheel & 2 pushbutton

HD10 grip with deadman & 2 proportional thumbwheel

HD10 grip with deadman & 1 proportional thumbwheel

HD11 grip with/without 1 pushbutton

HD50 grip with center-lock (lift to release)
وحدة التحكم في عصا التحكم الصناعية متعددة المحاور | RT02